Revolution in Home Robotics: Memo’s Breakthrough in Dexterity
While clearing the dinner table and loading the dishwasher might seem mundane, these tasks pose significant challenges for home robots, demanding extensive training data and financial resources. Yet, a startup has claimed to have tackled these challenges in a surprisingly short time and with reduced costs.
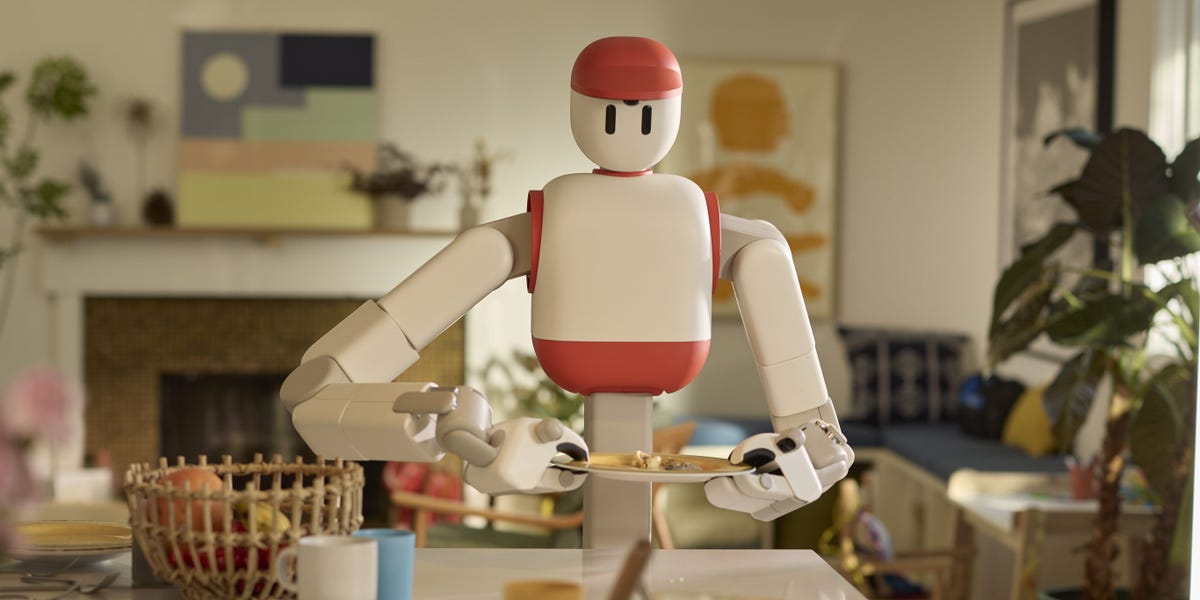
Emerging from stealth on Thursday, Sunday Robotics introduced Memo, an autonomous home robot designed to perform household chores, making a splash in the robotics community. In a captivating demonstration shared on X by Tony Zhao, the company’s cofounder, Memo efficiently moved between rooms, clearing dishes and loading a dishwasher autonomously.
Memo’s capabilities extend beyond just handling dishes; the robot also demonstrated picking up fragile wine glasses with one hand, folding socks, and operating an espresso machine. These tasks highlight Memo’s dexterity, a significant achievement for the startup, founded by Zhao and Cheng Chi, both experts in robotics, in April 2024.
Courtesy Sunday
“Today, we present a step-change in robotic AI,” Zhao remarked in an X post, proudly noting that Memo did not break a single wine glass in over 20 live demonstrations. For robots, handling delicate household items is a critical measure of dexterity, akin to replicating the intricate functions of the human hand, which has thousands of touch receptors.
Training robots typically faces hurdles, with many companies relying on teleoperations or simulations. However, Sunday Robotics takes a different approach. The startup developed a proprietary glove that replicates Memo’s hand structure, allowing a human to perform tasks and provide essential data, such as the force needed to lift objects.
Zhao emphasized the efficiency of this method, stating in an X post that it offers “two orders of magnitude higher capital efficiency compared to teleoperation ($200 vs $20,000).” This scalable solution leverages over 500 data collectors across the US, generating training data for Memo without relocating the robot.
In a conversation with “TBPN,” Zhao explained, “In robotics, if the only thing we can rely on is teleoperation, to gather the amount of training data it would take like decades for sure.”